
Publications
* indicates that authors contributed equally.
 Yunsheng Tian, Joshua Jacob, Yijiang Huang, Jialiang Zhao, Edward Gu, Pingchuan Ma, Annan Zhang, Farhad Javid, Branden Romero, Sachin Chitta, Shinjiro Sueda, Hui Li, Wojciech Matusik
Yunsheng Tian, Joshua Jacob, Yijiang Huang, Jialiang Zhao, Edward Gu, Pingchuan Ma, Annan Zhang, Farhad Javid, Branden Romero, Sachin Chitta, Shinjiro Sueda, Hui Li, Wojciech Matusik
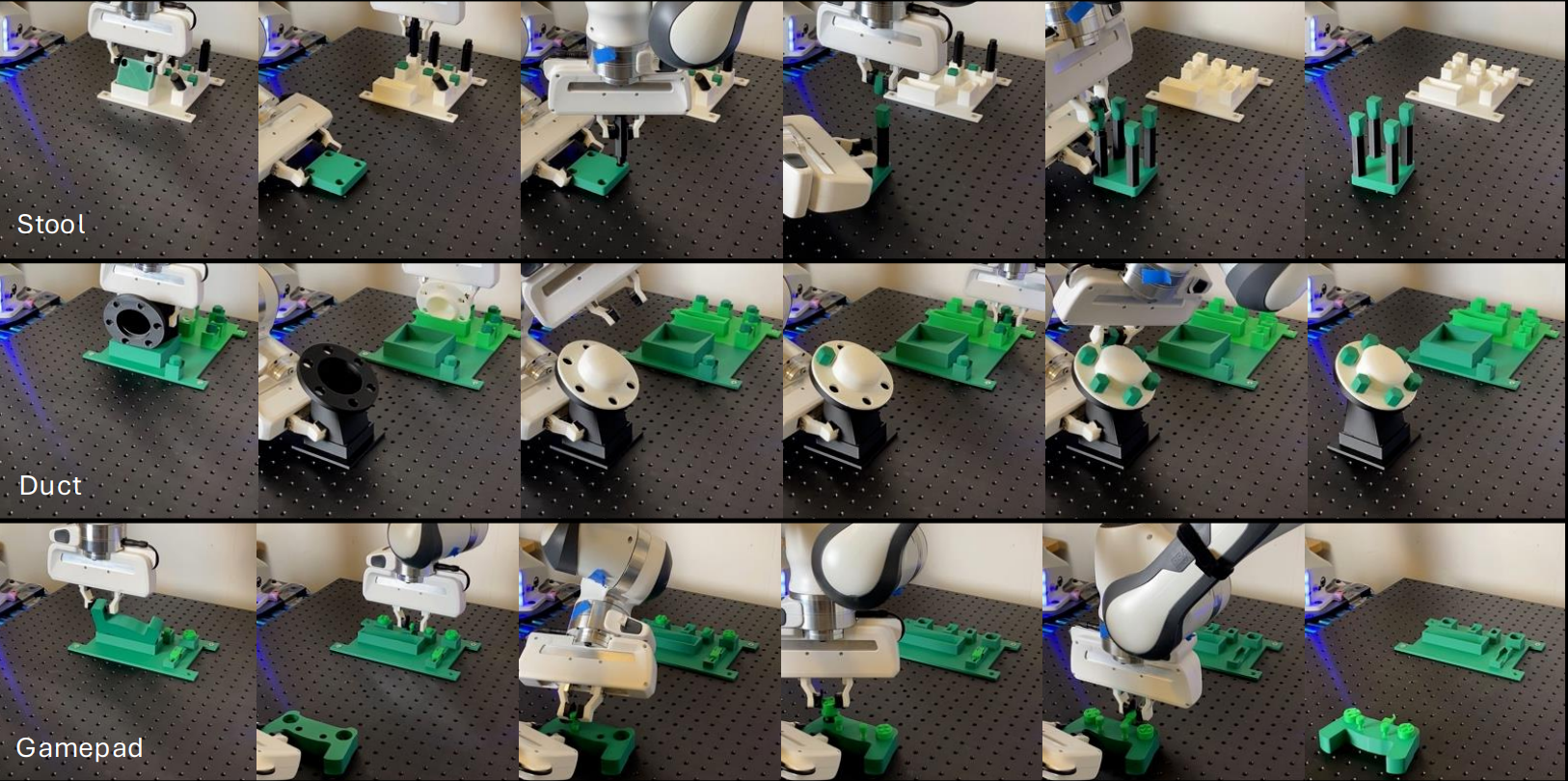
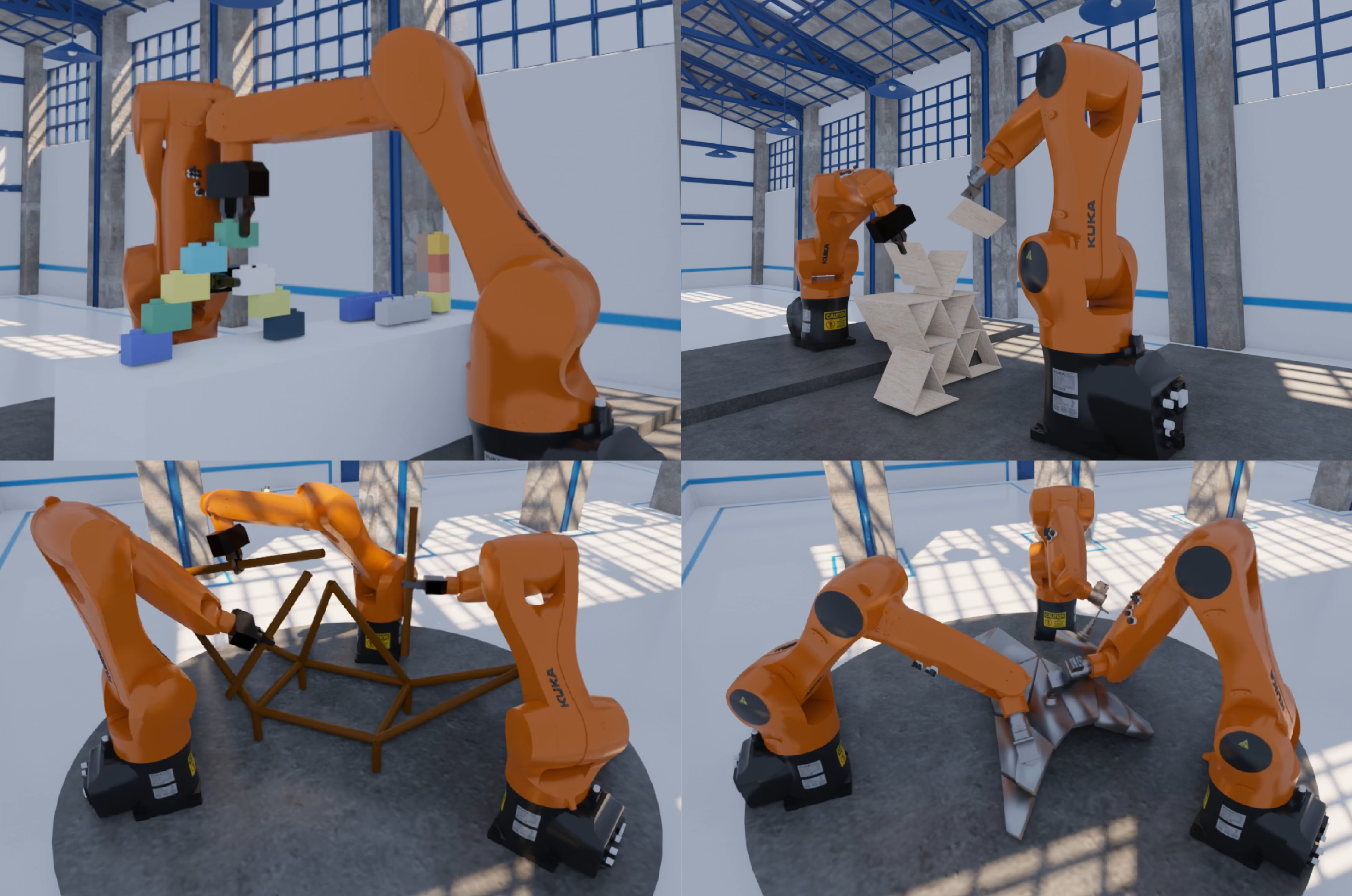
“Fabrica: Dual-Arm Assembly of General Multi-Part Objects via Integrated Planning and Learning,”
Conference of Robot Learning (CORL) 2025
Best Paper Award
[BibTeX] [PDF] [Code] [Video] [Webpage] [Talk]
 Yijiang Huang*, Ziqi Wang∗, Yi-Hsiu Hung, Chenming Jiang, Aurèle Gheyselinck, Stelian Coros
Yijiang Huang*, Ziqi Wang∗, Yi-Hsiu Hung, Chenming Jiang, Aurèle Gheyselinck, Stelian Coros
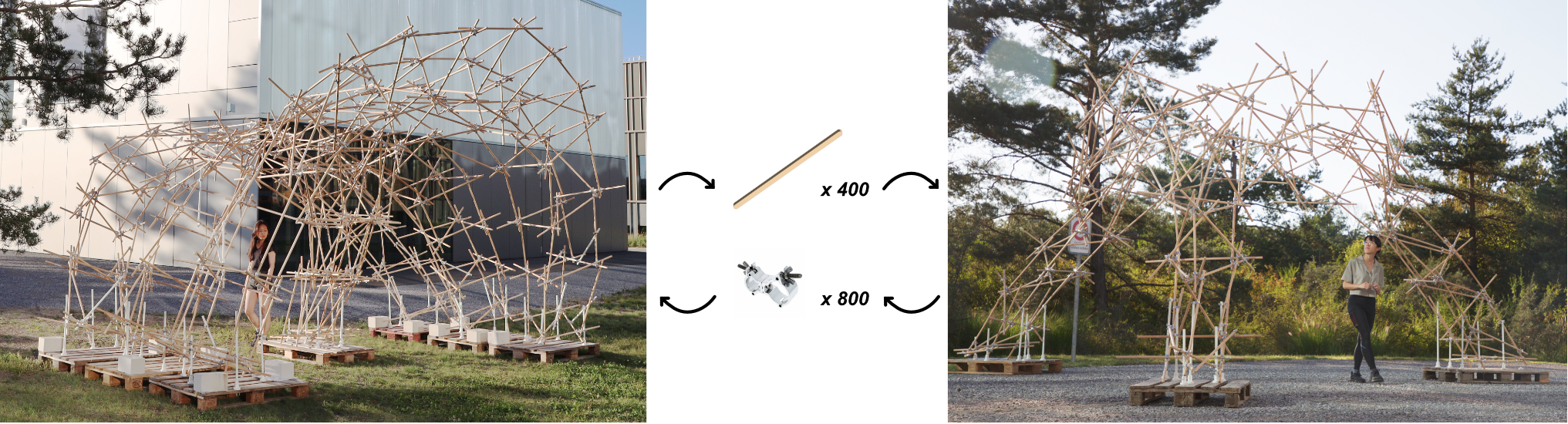
“Computational design and fabrication of reusable multi-tangent bar structures,”
Journal of Computer-Aided Design, final revision, 2025.
[PDF] [Code]
 Pok Yin Victor Leung, Yijiang Huang
Pok Yin Victor Leung, Yijiang Huang
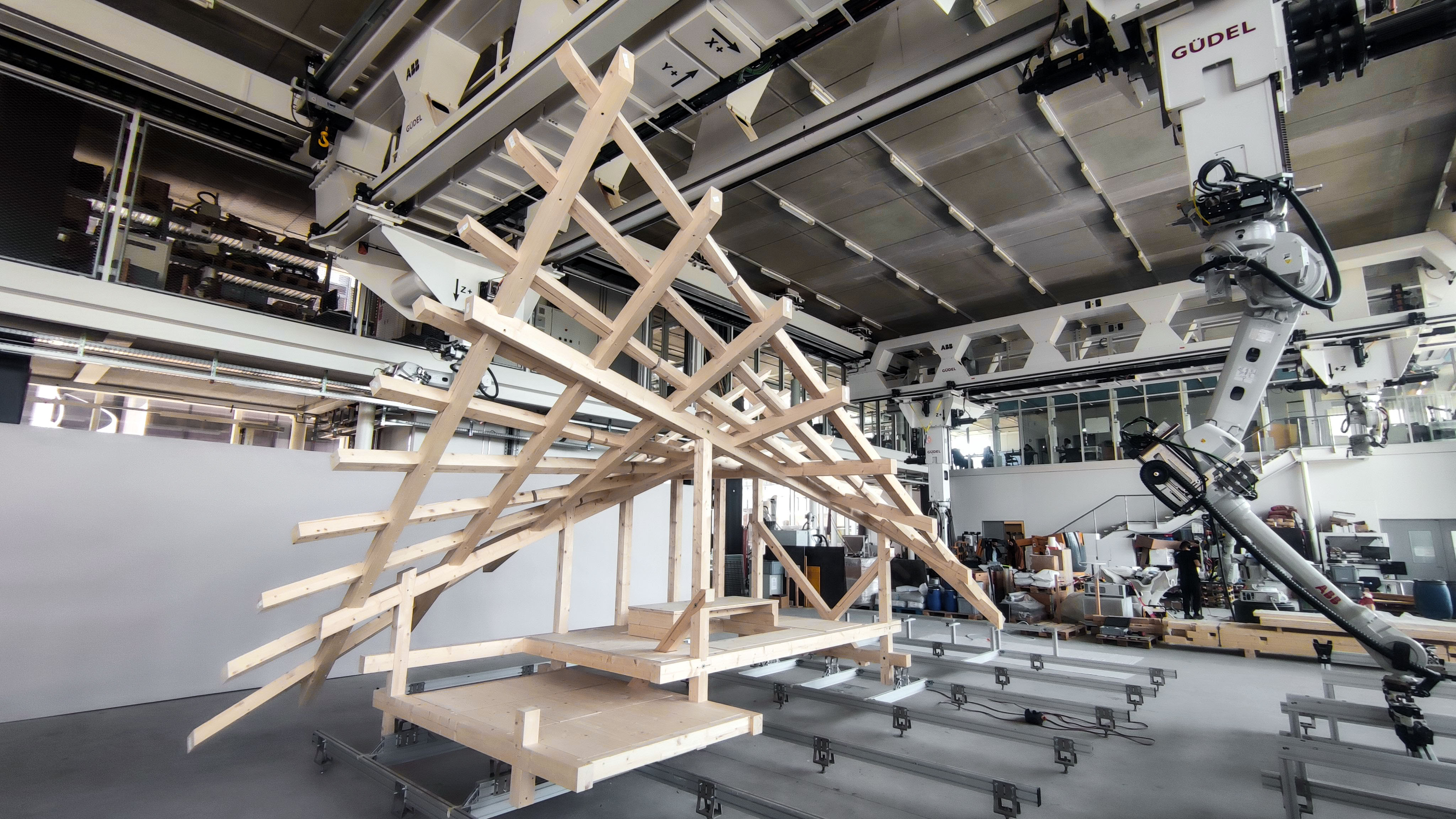
“Design Validation and Conflict Resolution for Robotic Fabrication: A Multi-Stage Framework for Complex and Non-Repetitive Processes,”
Proceedings of CAAD Future 2025, Hongkong.
Best paper award - 2rd runner up
[BibTeX] [PDF]
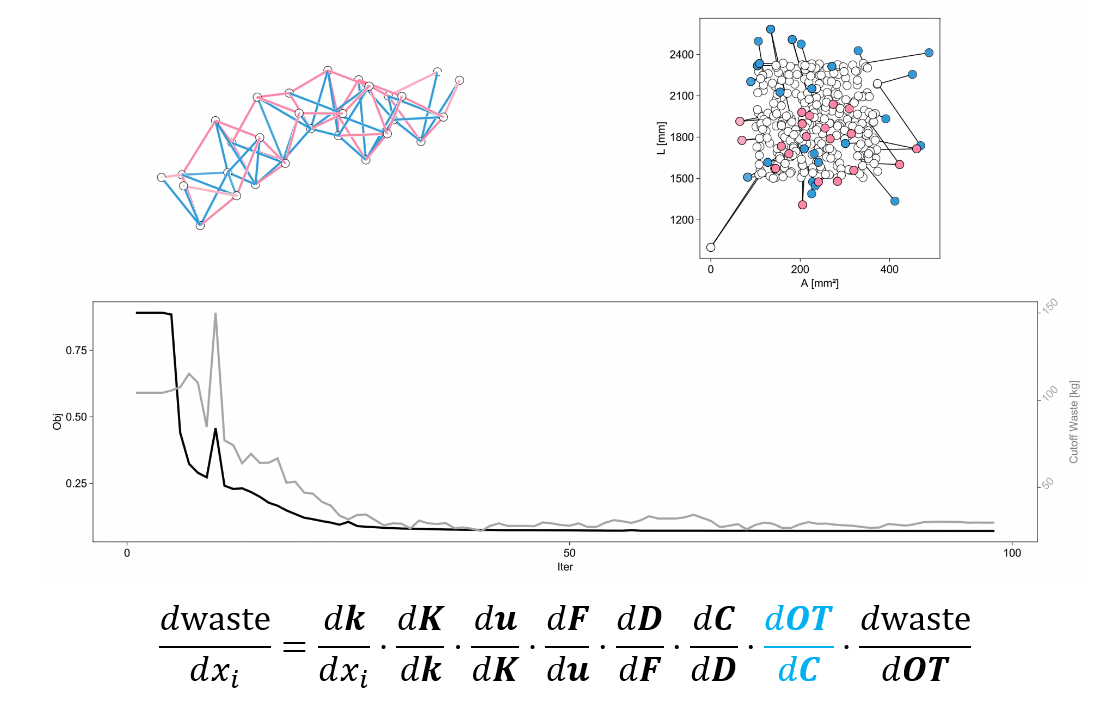
 Keith J. Lee, Yijiang Huang, Caitlin Mueller
Keith J. Lee, Yijiang Huang, Caitlin Mueller
“A differentiable structural analysis framework for high-performance design optimization,”
Structures.
[BibTeX] [PDF] [DOI] [Code]
 Peiyu Zeng*, Yijiang Huang*, Simon Huber, Stelian Coros
Peiyu Zeng*, Yijiang Huang*, Simon Huber, Stelian Coros
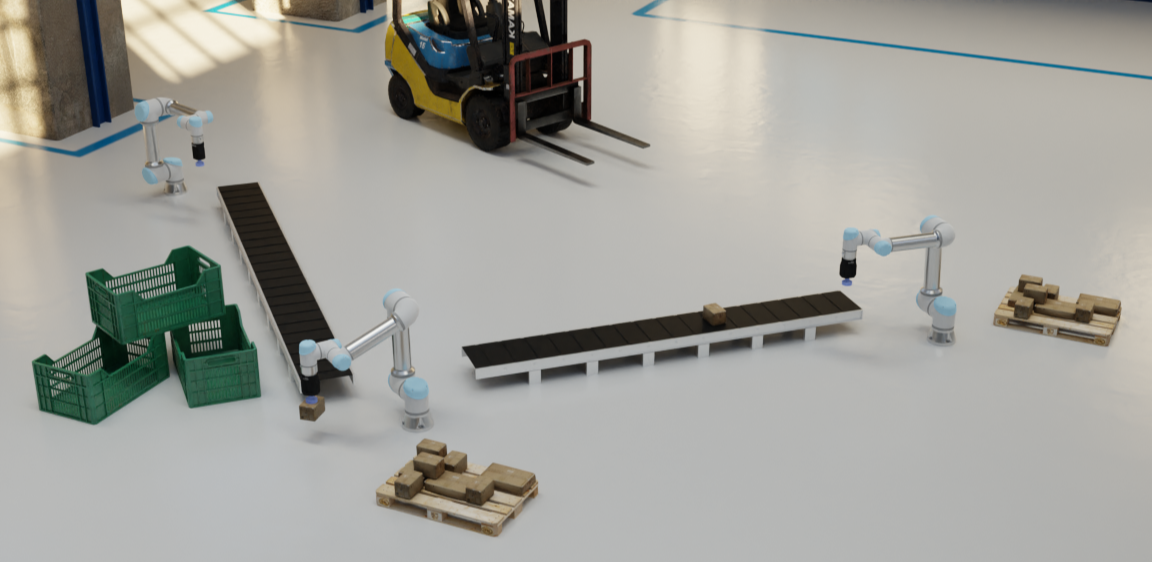
“Budget-optimal multi-robot layout design for box sorting,”
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025, Hangzhou, China.
[BibTeX] [PDF] [DOI] [Code] [Video]
 Yijiang Huang, Caelan Garret, Caitlin Mueller
Yijiang Huang, Caelan Garret, Caitlin Mueller
“Constructability-driven design of frame structures with state-space search methods,”
Automation in Construction.
[BibTeX] [PDF] [DOI] [Code]
 Chenming Jiang, Yi-Hsiu Hung, Ziqi Wang, Yijiang Huang, Aurele L. Gheyselinck, Petrus Aejmelaeus-Lindstrom
Chenming Jiang, Yi-Hsiu Hung, Ziqi Wang, Yijiang Huang, Aurele L. Gheyselinck, Petrus Aejmelaeus-Lindstrom
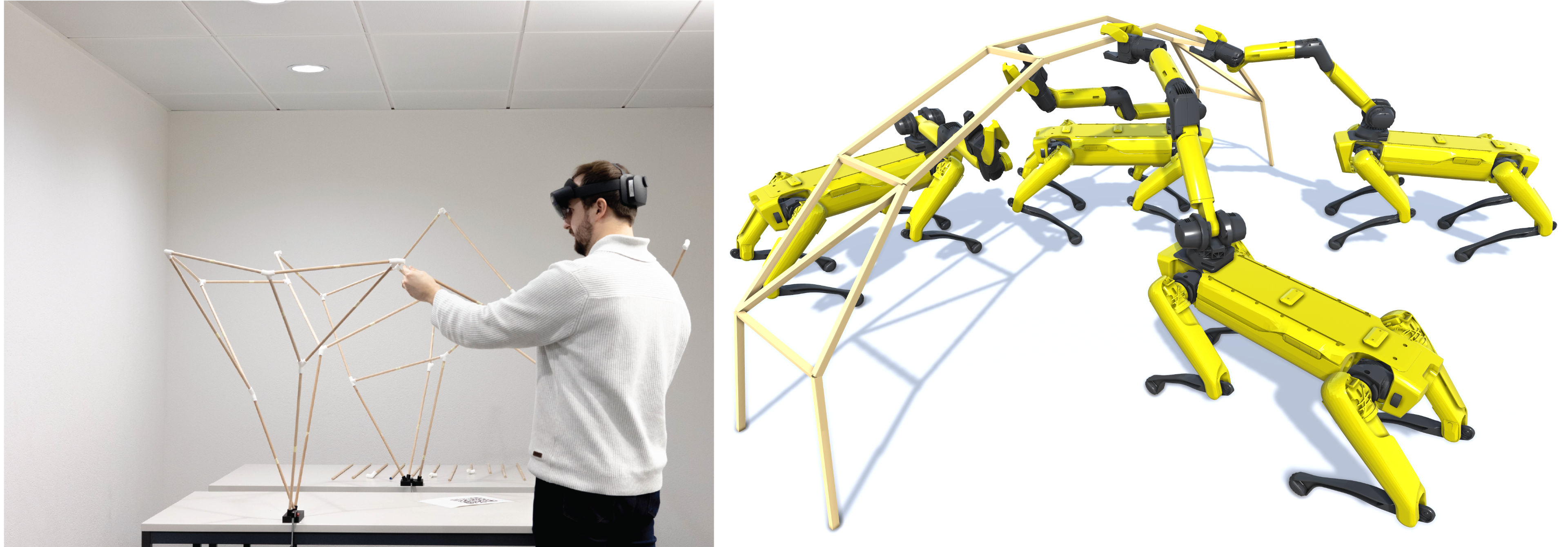
“Computational Design and AR-assisted Assembly of Infinitely Reusable Temporary Structures,”
in: Proceedings of International Association for Shell and Spatial Structures (IASS) 2024.
[BibTeX] [PDF]
 Pok Yin Victor Leung, Yijiang Huang, Caelan Garret, Fabio Gramazio, Matthias Kohler
Pok Yin Victor Leung, Yijiang Huang, Caelan Garret, Fabio Gramazio, Matthias Kohler
“Planning Non-repetitive Robotic Assembly Processes with Task and Motion Planning (TAMP),”
In: Robotic Fabrication in Architecture, Art and Design 2024.
[BibTeX] [PDF] [Code]
 Kiran Doshi, Yijiang Huang, Stelian Coros
Kiran Doshi, Yijiang Huang, Stelian Coros
“On Hand-Held Grippers and the Morphological Gap in Human Manipulation Demonstration,”
arxiv 2311.01832.
[BibTeX] [PDF] [Video]
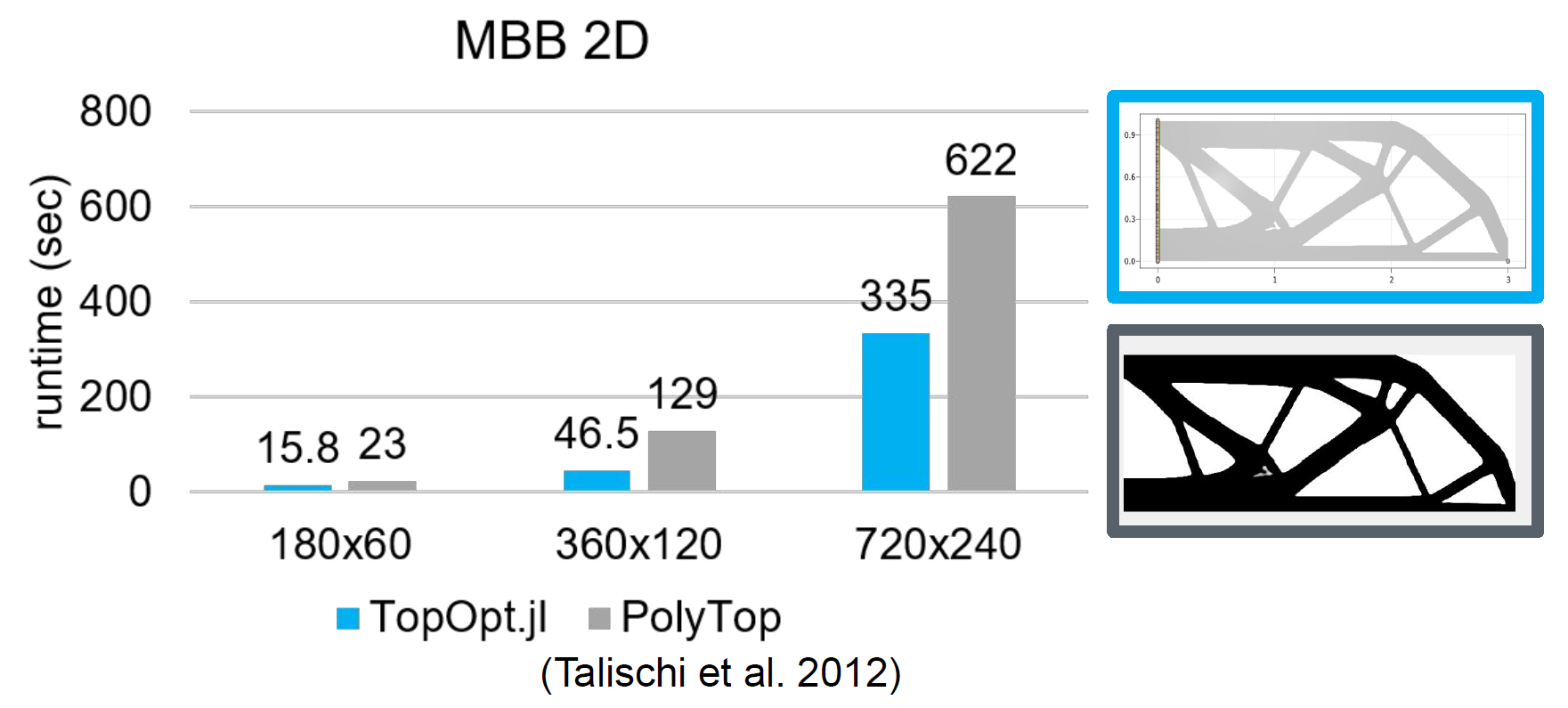
 Mohamed Tarek, Yijiang Huang
Mohamed Tarek, Yijiang Huang
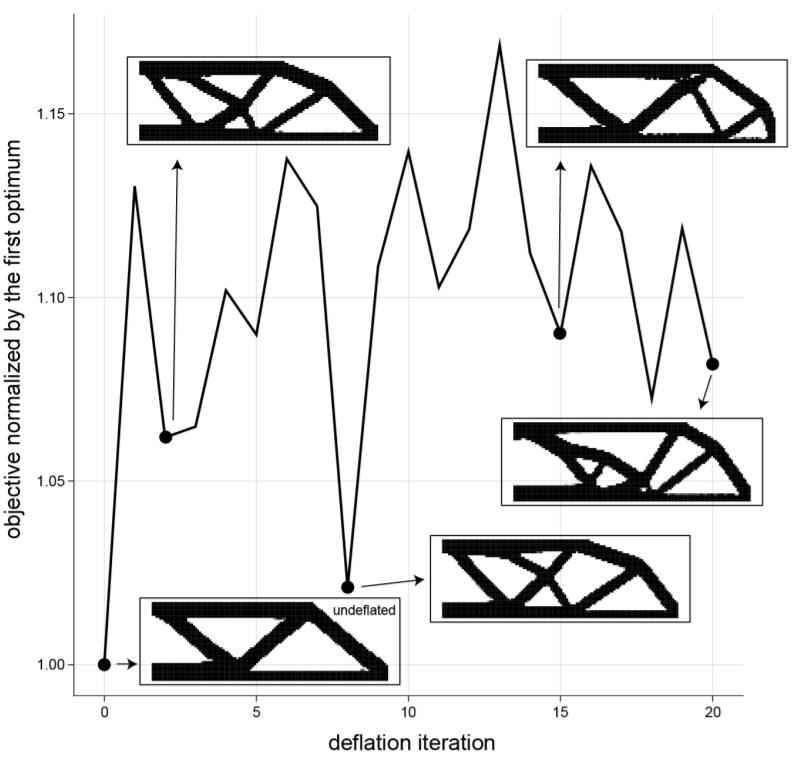
“General deflation for finding multiple local optima in non-convex optimization,”
arxiv 2201.11926.
[BibTeX] [PDF] [Code]
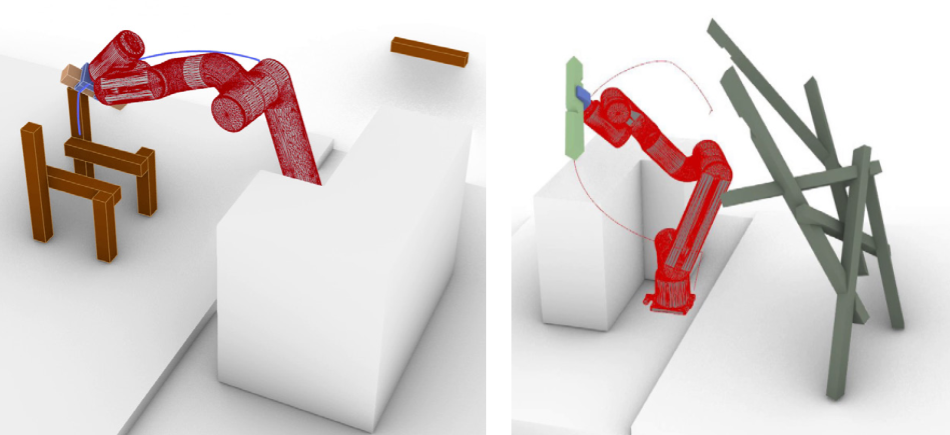
 Ziqi Wang, Florian Kennel-Maushart, Yijiang Huang, Bernhard Thomaszewski, Stelian Coros
Ziqi Wang, Florian Kennel-Maushart, Yijiang Huang, Bernhard Thomaszewski, Stelian Coros
“ A Temporal Coherent Topology Optimization Approach for Assembly Planning of Bespoke Frame Structures ,”
ACM Transactions on Graphics (TOG), 2023.
[BibTeX] [PDF] [Supplementary] [Video] [AR/Robot video]
 Davide Tanadini, Giulia Boller, Pok Yin Leung, Yijiang Huang, Pierluigi D'Acunto
Davide Tanadini, Giulia Boller, Pok Yin Leung, Yijiang Huang, Pierluigi D'Acunto
“The CantiBox - Robotic Assembly of Interweaving Timber Linear Elements Using Bespoke Interlocking Timber-to-Timber Connections,”
Proceedings of ACADIA 2022.
[BibTeX] [PDF] [DOI]
 Jingkai Chen, Jiaoyang Li*, Yijiang Huang*, Caelan Garrett, Dawei Sun, Chuchu Fan, Andreas Hofmann, Caitlin Mueller, Sven Koenig, Brian C. Williams
Jingkai Chen, Jiaoyang Li*, Yijiang Huang*, Caelan Garrett, Dawei Sun, Chuchu Fan, Andreas Hofmann, Caitlin Mueller, Sven Koenig, Brian C. Williams
“Cooperative Task and Motion Planning for Multi-Arm Assembly Systems,”
arxiv 2203.02475.
[BibTeX] [arxiv:2203.02475] [Video demo]
 Yijiang Huang, Pok Yin Victor Leung, Caelan Garrett, Fabio Gramazio, Matthias Kohler, Caitlin Mueller
Yijiang Huang, Pok Yin Victor Leung, Caelan Garrett, Fabio Gramazio, Matthias Kohler, Caitlin Mueller
“The new analog: A protocol for linking design and construction intent with algorithmic planning for robotic assembly of complex structures,”
In: ACM Symposium on Computational Fabrication, 2021.
[BibTeX] [PDF] [Code]
 Yijiang Huang, Latifa Alkhayat, Catherine De Wolf, Caitlin T. Mueller
Yijiang Huang, Latifa Alkhayat, Catherine De Wolf, Caitlin T. Mueller
“Algorithmic circular design with reused structural elements: Method and Tool,”
International FIB symposium of Conceptual Design of Structures, 2021.
[BibTeX] [PDF] [fib port] [Code]
 Yijiang Huang, Caelan R. Garrett, Ian Ting, Stefana Parascho, Caitlin T. Mueller
Yijiang Huang, Caelan R. Garrett, Ian Ting, Stefana Parascho, Caitlin T. Mueller
“Robotic additive construction of bar structures: Unified sequence and motion planning,”
Construction Robotics, vol. 5, pp. 115-130, 2021.
[BibTeX] [arXiv:2105.11438] [DOI] [Youtube videos] [Code]
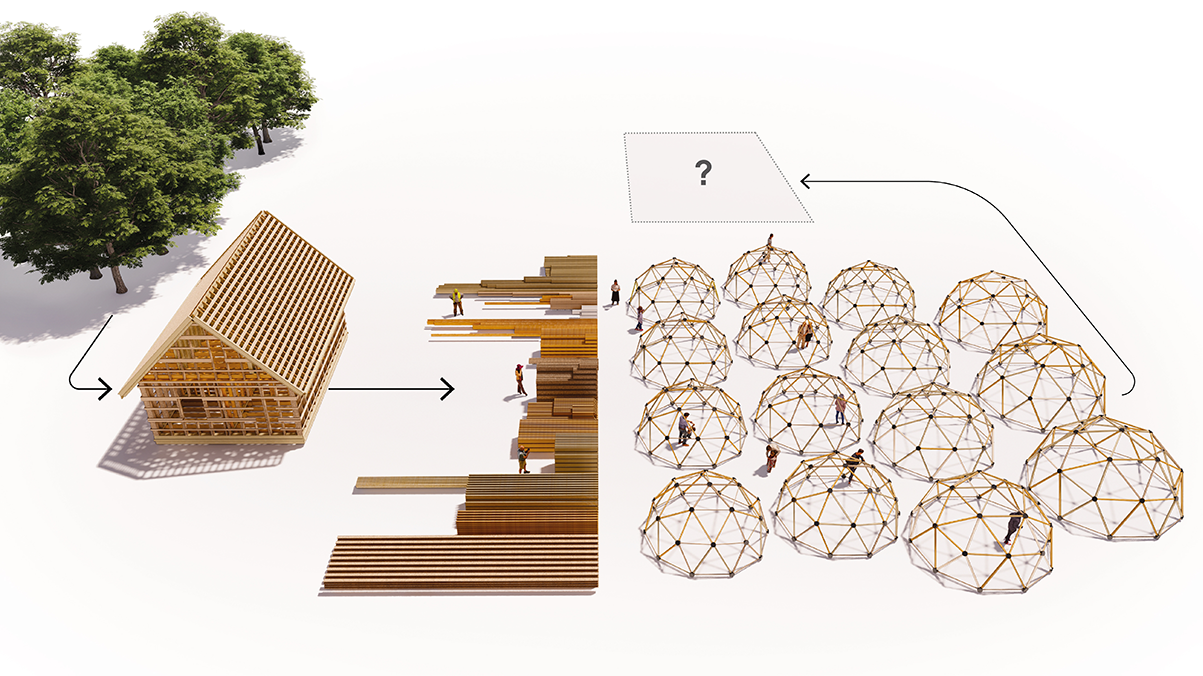
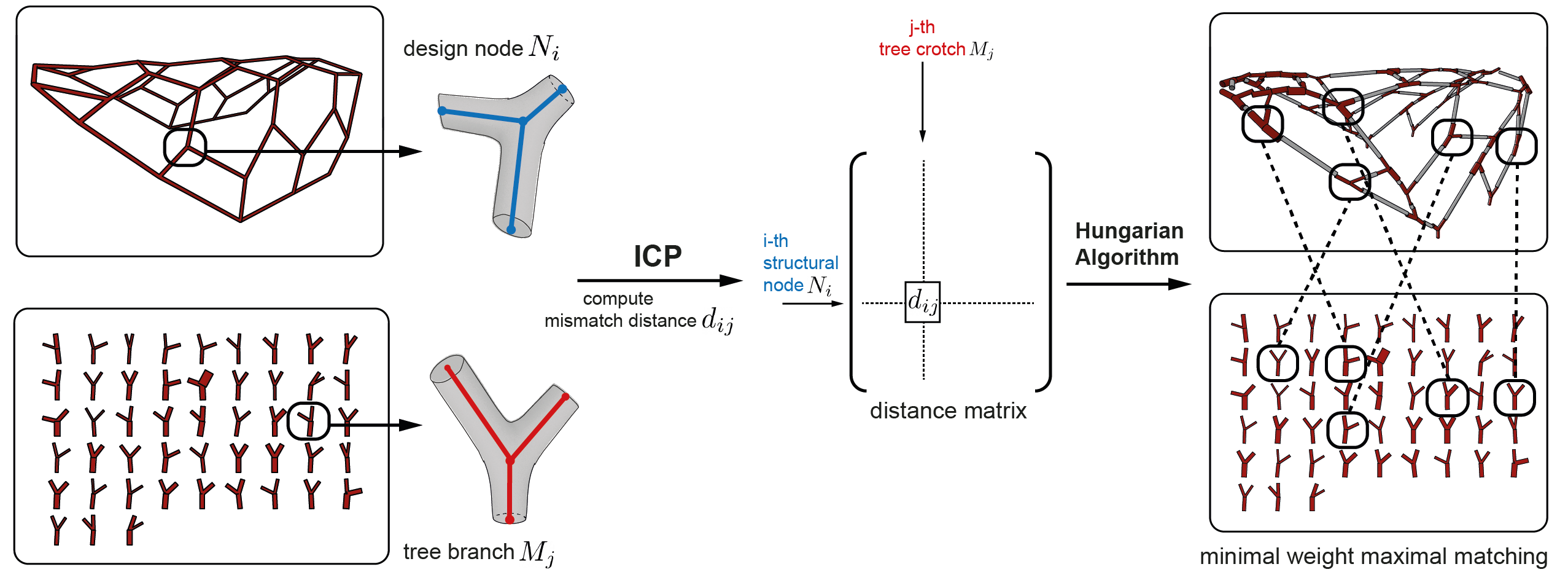 Felix Amtsberg*, Yijiang Huang*, Daniel J.M. Marshall, Kevin Moreno Gata, Caitlin Mueller
Felix Amtsberg*, Yijiang Huang*, Daniel J.M. Marshall, Kevin Moreno Gata, Caitlin Mueller
“Structural upcycling: Matching digital and natural geometry,”
Advances in Architectural Geometry, 2020.
[BibTeX] [PDF] [Talk-Youtube] [MIT news] [Dezeen]
 Caelan R. Garrett*, Yijiang Huang*, Tomás Lozano-Pérez, Caitlin T. Mueller
Caelan R. Garrett*, Yijiang Huang*, Tomás Lozano-Pérez, Caitlin T. Mueller
“Scalable and Probabilistically Complete Planning for Robotic Spatial Extrusion,”
In: Robotics: Science and Systems (RSS), 2020
[BibTeX] [arXiv:2002.02360] [RSS port] [Talk] [Youtube] [Code]
 Rahul Arora, Alec Jacobson, Timothy R. Langlois, Yijiang Huang, Caitlin Mueller, Wojciech Matusik, Ariel Shamir, Karan Singh, David I.W. Levin
Rahul Arora, Alec Jacobson, Timothy R. Langlois, Yijiang Huang, Caitlin Mueller, Wojciech Matusik, Ariel Shamir, Karan Singh, David I.W. Levin
“Volumetric Michell trusses for parametric design & fabrication,”
In: ACM Symposium on Computational Fabrication, 2019.
[BibTeX] [PDF] [DOI] [Website]
 Lavender Tessmer, Yijiang Huang, Caitlin Mueller
Lavender Tessmer, Yijiang Huang, Caitlin Mueller
“Additive Casting of Mass-Customizable Bricks: Workflow for Design and Robotic Fabrication,”
In: Conference of The Association for Computer Aided Design in Architecture (ACADIA), 2019.
[BibTeX] [PDF] [CumInCAD Port] [Project]
 Yijiang Huang, Caelan R. Garrett, Caitlin T. Mueller
Yijiang Huang, Caelan R. Garrett, Caitlin T. Mueller
“Automated sequence and motion planning for robotic spatial extrusion of 3D trusses,”
Construction Robotics, vol. 2, no. 1-4, pp. 15-39, 2018.
[BibTeX] [arXiv:1810.00998] [DOI] [Youtube videos] [Code-ROS]
 Yijiang Huang, Josephine Carstensen, Lavender Tessmer and Caitlin Mueller
Yijiang Huang, Josephine Carstensen, Lavender Tessmer and Caitlin Mueller
“Robotic extrusion of architectural structures with nonstandard topology,”
In: Robotic Fabrication in Architecture, Art and Design 2018.
[BibTeX] [PDF] [DOI] [Code-ROS]
 Yijiang Huang, Josephine Carstensen and Caitlin Mueller
Yijiang Huang, Josephine Carstensen and Caitlin Mueller
“3D truss topology optimization for automated robotic spatial extrusion,”
In: Proceedings of International Association for Shell and Spatial Structures (IASS) 2018.
[BibTeX] [PDF] [Code-ROS]
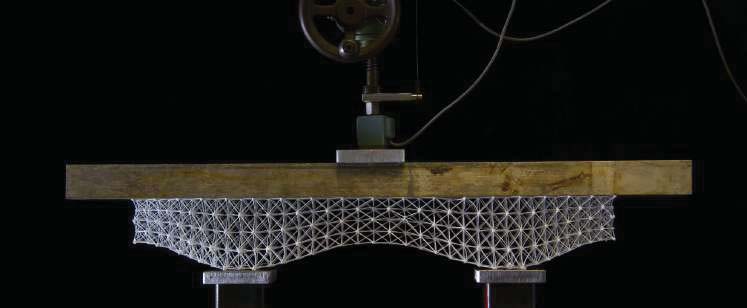 Kam-Ming Mark Tam, Daniel J. Marshall, Mitchell Gu, Jasmine Kim, Yijiang Huang, Justin Lavallee, Caitlin T. Mueller
Kam-Ming Mark Tam, Daniel J. Marshall, Mitchell Gu, Jasmine Kim, Yijiang Huang, Justin Lavallee, Caitlin T. Mueller
“Fabrication-aware structural optimisation of lattice additive-manufactured with robot-arm,”
International Journal of Rapid Manufacturing, vol. 7, no. 2-3, pp. 120-168, 2018.
[BibTeX] [PDF] [DOI]
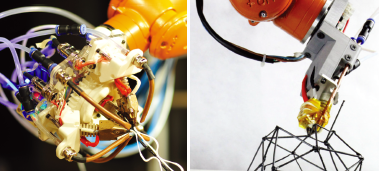
 Yijiang Huang, Juyong Zhang, Xin Hu, Guoxian Song, Zhongyuan Liu, Lei Yu and Ligang Liu
Yijiang Huang, Juyong Zhang, Xin Hu, Guoxian Song, Zhongyuan Liu, Lei Yu and Ligang Liu
“FrameFab: Robotic Fabrication of Frame Shapes,”
ACM Transactions on Graphics (TOG), vol. 35, no. 6, pp. 224:1--224:11 2016.
[BibTeX] [PDF] [ACM-DL Port] [Code] [Video]
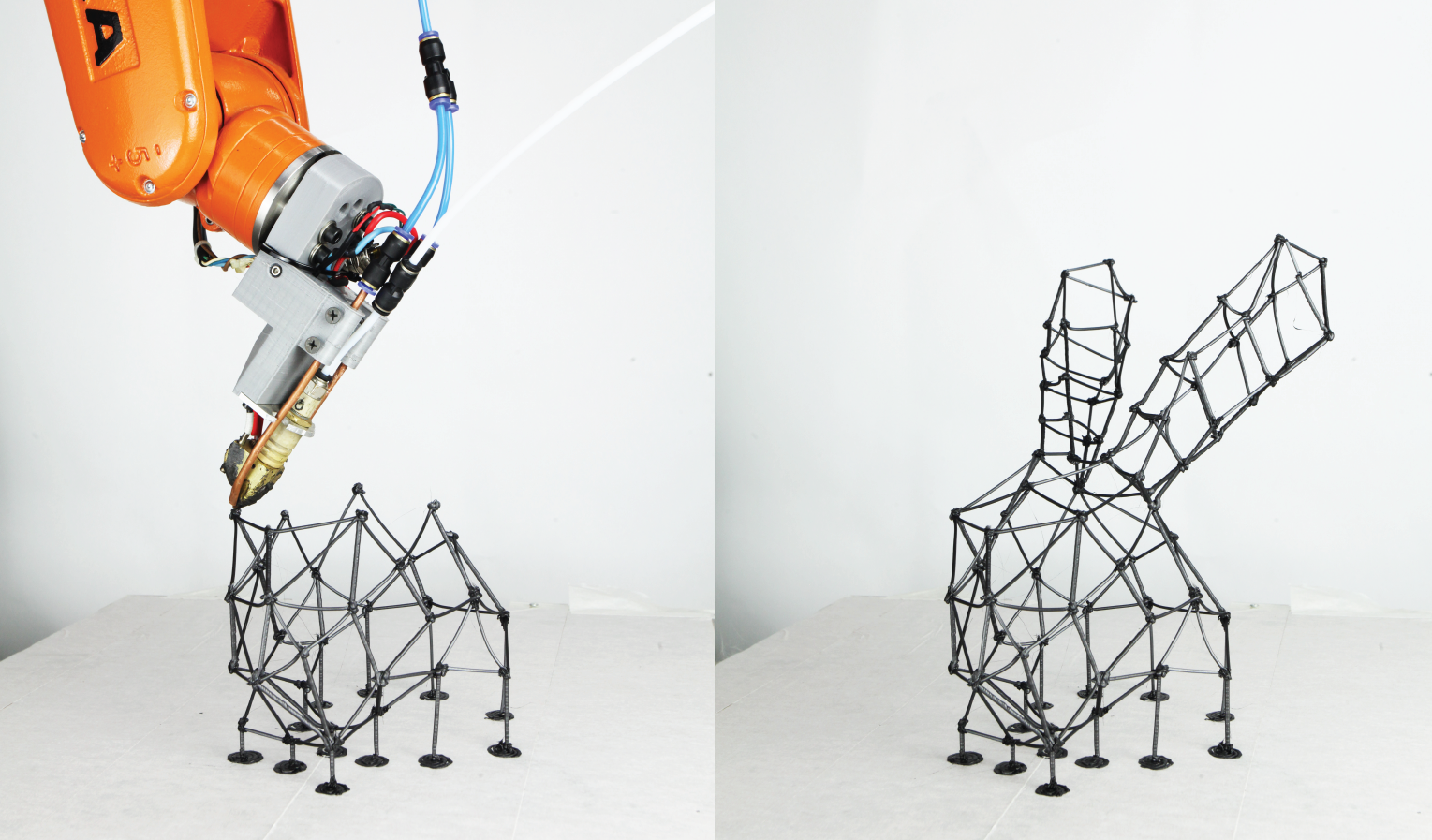
 Lei Yu, Yijiang Huang, Zhongyuan Liu, Sai Xiao, Ligang Liu, Guoxian Song, Yanxin Wang
Lei Yu, Yijiang Huang, Zhongyuan Liu, Sai Xiao, Ligang Liu, Guoxian Song, Yanxin Wang
“Highly Informed Robotic 3D Printed Polygon Mesh - A Novel Strategy of 3D Spatial Printing,”
In: Conference of The Association for Computer Aided Design in Architecture (ACADIA), 2016.
[BibTeX] [PDF] [CumInCAD Port]
Yijiang Huang*, Pok Yin Victor Leung*, Caelan Garret, Fabio Gramazio, Matthias Kohler
“Planning Non-repetitive Robotic Assembly Processes with Task and Motion Planning (TAMP),”
In: 3rd Workshop on Future of Construction: Lifelong Learning Robots in Changing Construction Sites (2024), ICRA, Yokohama, Japan.
[Poster]
Yunsheng Tian, Joshua Jacob, Yijiang Huang, Jialiang Zhao, Edward Gu, Pingchuan Ma, Annan Zhang, Farhad Javid, Branden Romero, Sachin Chitta, Shinjiro Sueda, Hui Li, Wojciech Matusik
“Fabrica: Dual-Arm Assembly of General Multi-Part Objects via Integrated Planning and Learning,”
Conference of Robot Learning (CORL) 2025
Best Paper Award
[BibTeX] [PDF] [Code] [Video] [Webpage] [Talk]
@inproceedings{tian2025fabrica,
author = {Tian, Yunsheng and Jacob, Joshua and Huang, Yijiang and Zhao, Jialiang and Gu, Edward and Ma, Pingchuan and Zhang, Annan and Javid, Farhad and Romero, Branden and Chitta, Sachin and Sueda, Shinjiro and Li, Hui and Matusik, Wojciech},
title = {Fabrica: Dual-Arm Assembly of General Multi-Part Objects via Integrated Planning and Learning},
booktitle = {Conference of Robot Learning (CORL)},
year = {2025},
url = {https://fabrica.csail.mit.edu/static/pdf/paper.pdf}
}
Yijiang Huang*, Ziqi Wang∗, Yi-Hsiu Hung, Chenming Jiang, Aurèle Gheyselinck, Stelian Coros“Computational design and fabrication of reusable multi-tangent bar structures,”
Journal of Computer-Aided Design, final revision, 2025.
[PDF] [Code]
@article{huang2025multi,
author = {},
title = {Computational design and fabrication of reusable multi-tangent bar structures},
journal = {Computer-Aided Design},
year = {2025},
note = {Final revision},
url = {https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4918415}
}
Pok Yin Victor Leung, Yijiang Huang
“Design Validation and Conflict Resolution for Robotic Fabrication: A Multi-Stage Framework for Complex and Non-Repetitive Processes,”
Proceedings of CAAD Future 2025, Hongkong.
Best paper award - 2rd runner up
[BibTeX] [PDF]
@inproceedings{leung2025validation,
author = {Leung, Pok Yin Victor and Huang, Yijiang},
title = {Design Validation and Conflict Resolution for Robotic Fabrication: A Multi-Stage Framework for Complex and Non-Repetitive Processes},
booktitle = {Proceedings of CAAD Future 2025},
year = {2025},
address = {Hongkong}
}
Keith J. Lee, Yijiang Huang, Caitlin Mueller
“A differentiable structural analysis framework for high-performance design optimization,”
Structures.
[BibTeX] [PDF] [DOI] [Code]
@article{lee2025differentiable,
title={A differentiable structural analysis framework for high-performance design optimization},
author={Lee, Keith J and Huang, Yijiang and Mueller, Caitlin T},
booktitle={Structures},
volume={78},
pages={109292},
year={2025},
organization={Elsevier}
}
Peiyu Zeng*, Yijiang Huang*, Simon Huber, Stelian Coros
“Budget-optimal multi-robot layout design for box sorting,”
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025, Hangzhou, China.
[BibTeX] [PDF] [DOI] [Code] [Video]
@inproceedings{zeng2025budget,
title={Budget-optimal multi-robot layout design for box sorting},
author={Zeng, Peiyu and Huang, Yijiang and Huber, Simon, and Coros, Stelian},
booktitle={International Robotics and Automation Conference (IROS)},
year={2025},
url={https://arxiv.org/pdf/2412.11281}
year={2025}
}
Yijiang Huang, Caelan Garret, Caitlin Mueller
“Constructability-driven design of frame structures with state-space search methods,”
Automation in Construction.
[BibTeX] [PDF] [DOI] [Code]
@article{huang2024constructability,
title={Constructability-driven design of frame structures with state-space search methods},
author={Huang, Yijiang and Garrett, Caelan and Mueller, Caitlin},
journal={Automation in Construction},
volume={167},
pages={105711},
year={2024},
publisher={Elsevier}
}
Chenming Jiang, Yi-Hsiu Hung, Ziqi Wang, Yijiang Huang, Aurele L. Gheyselinck, Petrus Aejmelaeus-Lindstrom
“Computational Design and AR-assisted Assembly of Infinitely Reusable Temporary Structures,”
in: Proceedings of International Association for Shell and Spatial Structures (IASS) 2024.
[BibTeX] [PDF]
@inproceedings{jiang2024computational,
title={Computational Design and AR-assisted Assembly of Infinitely Reusable Temporary Structures},
author={Jiang, Chenming and Hung, Yi-Hsiu and Wang, Ziqi and Huang, Yijiang and Gheyselinck, Aurele and Aejmelaeus-Lindstrom, Petrus},
booktitle={Proceedings of International Association for Shell and Spatial Structures (IASS)},
year={2024}
}
Pok Yin Victor Leung, Yijiang Huang, Caelan Garret, Fabio Gramazio, Matthias Kohler
“Planning Non-repetitive Robotic Assembly Processes with Task and Motion Planning (TAMP),”
In: Robotic Fabrication in Architecture, Art and Design 2024.
[BibTeX] [PDF] [Code]
@inproceedings{leung2024robarch,
title={Planning Non-repetitive Robotic Assembly Processes with Task and Motion Planning (TAMP)},
author={Leung, Pok Yin Victor and Huang, Yijiang and Garret, Caelan and Gramazio, Fabio and Kohler, Matthias},
booktitle={Proceedings of Robotic Fabrication in Architecture, Art and Design 2024},
year={2024},
organization={Springer}
}
Kiran Doshi, Yijiang Huang, Stelian Coros
“On Hand-Held Grippers and the Morphological Gap in Human Manipulation Demonstration,”
arxiv 2311.01832.
[BibTeX] [PDF] [Video]
@article{doshi2023hand,
title={On Hand-Held Grippers and the Morphological Gap in Human Manipulation Demonstration},
author={Doshi, Kiran and Huang, Yijiang and Coros, Stelian},
journal={arXiv preprint arXiv:2311.01832},
year={2023}
}
Mohamed Tarek, Yijiang Huang
“General deflation for finding multiple local optima in non-convex optimization,”
arxiv 2201.11926.
[BibTeX] [PDF] [Code]
@article{tarek2022deflation,
title={General deflation for finding multiple local optima in
non-convex optimization},
author={Tarek, Mohamed and Huang, Yijiang},
journal={arXiv preprint arXiv:2201.11926},
year={2022}
}
Ziqi Wang, Florian Kennel-Maushart, Yijiang Huang, Bernhard Thomaszewski, Stelian Coros
“ A Temporal Coherent Topology Optimization Approach for Assembly Planning of Bespoke Frame Structures ,”
ACM Transactions on Graphics (TOG), 2023.
[BibTeX] [PDF] [Supplementary] [Video] [AR/Robot video]
@article{wang2023temporal,
author = {Wang, Ziqi and Kennel-Maushart, Florian and Huang, Yijiang and Thomaszewski, Bernhard and Coros, Stelian
},
title = {A Temporal Coherent Topology Optimization Approach for Assembly Planning of Bespoke Frame Structures},
journal = {ACM Trans. Graph.},
issue_date = {August 2023},
publisher = {ACM},
}
Davide Tanadini, Giulia Boller, Pok Yin Leung, Yijiang Huang, Pierluigi D'Acunto
“The CantiBox - Robotic Assembly of Interweaving Timber Linear Elements Using Bespoke Interlocking Timber-to-Timber Connections,”
Proceedings of ACADIA 2022.
[BibTeX] [PDF] [DOI]
@inproceedings{tanadini2022cantibox,
title={The CantiBox-Robotic Assembly of Interweaving Timber Linear Elements Using Bespoke Interlocking Timber-to-Timber Connections},
author={Tanadini, Davide and Boller, Giulia and Leung, Pok Yin and Huang, Yijiang and D'Acunto, Pierluigi},
booktitle={Hybrids and Haecceities: Projects Catalog of the 42nd Annual Conference of the Association of Computer Aided Design in Architecture},
pages={131--141},
year={2022},
organization={Association for Computer Aided Design in Architecture}
}
Jingkai Chen, Jiaoyang Li*, Yijiang Huang*, Caelan Garrett, Dawei Sun, Chuchu Fan, Andreas Hofmann, Caitlin Mueller, Sven Koenig, Brian C. Williams
“Cooperative Task and Motion Planning for Multi-Arm Assembly Systems,”
arxiv 2203.02475.
[BibTeX] [arxiv:2203.02475] [Video demo]
@article{chen2022coop,
title={Cooperative Task and Motion Planning for Multi-Arm Assembly Systems},
author={Chen, Jingkai and Li, Jiaoyang and Huang, Yijiang and Garrett, Caelan and Sun, Dawei and Fan, Chuchu and Hofmann, Andreas and Mueller, Caitlin and Koenig, Sven and Williams, Brian C.},
year={2022}, month={Mar},
url={http://arxiv.org/abs/2203.02475},
DOI={10.48550/arXiv.2203.02475},
note={arXiv:2203.02475 [cs]},
number={arXiv:2203.02475},
publisher={arXiv}
}
Yijiang Huang, Pok Yin Victor Leung, Caelan Garrett, Fabio Gramazio, Matthias Kohler, Caitlin Mueller
“The new analog: A protocol for linking design and construction intent with algorithmic planning for robotic assembly of complex structures,”
In: ACM Symposium on Computational Fabrication, 2021.
[BibTeX] [PDF] [Code]
@inproceedings{huang2021analog,
author = {Huang, Yijiang and Leung, Pok Yin Victor and Garrett, Caelan and Gramazio, Fabio and Kohler, Matthias and Mueller, Caitlin},
title = {The new analog: A protocol for linking design and construction intent with
algorithmic planning for robotic assembly of complex structures},
year = {2021},
publisher = {Association for Computing Machinery},
booktitle = {Symposium on Computational Fabrication},
series = {SCF '21},
doi = {https://doi.org/10.1145/3485114.3485122}
}
Yijiang Huang, Latifa Alkhayat, Catherine De Wolf, Caitlin T. Mueller
“Algorithmic circular design with reused structural elements: Method and Tool,”
International FIB symposium of Conceptual Design of Structures, 2021.
[BibTeX] [PDF] [fib port] [Code]
@inproceedings{huang2021circular,
title={Algorithmic circular design with reused structural elements: Method and Tool},
author={Huang, Yijiang and Alkhayat, Latifa and De Wolf, Catherine and Mueller, Caitlin Tobin},
booktitle={Proceedings of International FIB symposium of Conceptual Design of Structures},
year={2021}
}
Yijiang Huang, Caelan R. Garrett, Ian Ting, Stefana Parascho, Caitlin T. Mueller
“Robotic additive construction of bar structures: Unified sequence and motion planning,”
Construction Robotics, vol. 5, pp. 115-130, 2021.
[BibTeX] [arXiv:2105.11438] [DOI] [Youtube videos] [Code]
@article{huang2021barassembly,
title={Robotic additive construction of bar structures: Unified sequence and motion planning},
author={Huang, Yijiang and Garrett, Caelan Reed and Ting, Ian and Parascho, Stefana and Mueller, Caitlin Tobin},
journal={Construction Robotics},
pages={115--130},
year={2021},
publisher={Springer}
}
Felix Amtsberg*, Yijiang Huang*, Daniel J.M. Marshall, Kevin Moreno Gata, Caitlin Mueller
“Structural upcycling: Matching digital and natural geometry,”
Advances in Architectural Geometry, 2020.
[BibTeX] [PDF] [Talk-Youtube] [MIT news] [Dezeen]
@inproceedings{amtsberg2020tree,
title={Structural upcycling: Matching digital and natural geometry},
author={Amtsberg, Felix and Huang, Yijiang and Marshall, Daniel J.M. and Gata, Kevin Moreno and Mueller, Caitlin},
booktitle={Proceedings of Advances in Architectural Geometry},
year={2020}
}
Caelan R. Garrett*, Yijiang Huang*, Tomás Lozano-Pérez, Caitlin T. Mueller
“Scalable and Probabilistically Complete Planning for Robotic Spatial Extrusion,”
In: Robotics: Science and Systems (RSS), 2020
[BibTeX] [arXiv:2002.02360] [RSS port] [Talk] [Youtube] [Code]
@inproceedings{garrett2020scalable,
title={Scalable and Probabilistically Complete Planning for Robotic Spatial Extrusion},
author={Garrett, Caelan Reed and Huang, Yijiang and Lozano-P{\'e}rez, Tom{\'a}s and Mueller, Caitlin Tobin},
booktitle={Robotics: Science and Systems (RSS)},
year={2020}
}
Rahul Arora, Alec Jacobson, Timothy R. Langlois, Yijiang Huang, Caitlin Mueller, Wojciech Matusik, Ariel Shamir, Karan Singh, David I.W. Levin
“Volumetric Michell trusses for parametric design & fabrication,”
In: ACM Symposium on Computational Fabrication, 2019.
[BibTeX] [PDF] [DOI] [Website]
@inproceedings{arora2019michell,
author = {Arora, Rahul and Jacobson, Alec and Langlois, Timothy R. and Huang, Yijiang
and Mueller, Caitlin and Matusik, Wojciech and Shamir, Ariel and
Singh, Karan and Levin, David I.W.},
title = {Volumetric Michell Trusses for Parametric Design \& Fabrication},
booktitle = {Proceedings of the 3rd ACM Symposium on Computation Fabrication},
series = {SCF '19},
year = {2019},
location = {Pittsburgh, PA, USA},
numpages = {13},
publisher = {ACM},
address = {New York, NY, USA}
}
Lavender Tessmer, Yijiang Huang, Caitlin Mueller
“Additive Casting of Mass-Customizable Bricks: Workflow for Design and Robotic Fabrication,”
In: Conference of The Association for Computer Aided Design in Architecture (ACADIA), 2019.
[BibTeX] [PDF] [CumInCAD Port] [Project]
@inproceedings{tessmer2019acadia,
title={Additive Casting of Mass-Customizable Bricks: Workflow for Design and Robotic Fabrication},
author={Tessmer, Lavender and Huang, Yijiang and Mueller, Caitlin},
booktitle={Proceedings of the 39st Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA)},
year={2019}
}
Yijiang Huang, Caelan R. Garrett, Caitlin T. Mueller
“Automated sequence and motion planning for robotic spatial extrusion of 3D trusses,”
Construction Robotics, vol. 2, no. 1-4, pp. 15-39, 2018.
[BibTeX] [arXiv:1810.00998] [DOI] [Youtube videos] [Code-ROS]
@article{huang2018automated,
title={Automated sequence and motion planning for robotic spatial extrusion of 3D trusses},
author={Huang, Yijiang and Garrett, Caelan R and Mueller, Caitlin T},
journal={Construction Robotics},
pages={15--39},
year={2018},
publisher={Springer}}
Yijiang Huang, Josephine Carstensen, Lavender Tessmer and Caitlin Mueller
“Robotic extrusion of architectural structures with nonstandard topology,”
In: Robotic Fabrication in Architecture, Art and Design 2018.
[BibTeX] [PDF] [DOI] [Code-ROS]
@inproceedings{huang2018robarch,
title={Robotic extrusion of architectural structures with nonstandard topology},
author={Huang, Yijiang and Carstensen, Josephine and Tessmer, Lavender and Mueller, Caitlin},
booktitle={Robotic Fabrication in Architecture, Art and Design},
pages={377--389},
year={2018},
organization={Springer}
}
Yijiang Huang, Josephine Carstensen and Caitlin Mueller
“3D truss topology optimization for automated robotic spatial extrusion,”
In: Proceedings of International Association for Shell and Spatial Structures (IASS) 2018.
[BibTeX] [PDF] [Code-ROS]
@inproceedings{huang2018iass,
title={3D truss topology optimization for automated robotic spatial extrusion},
author={Huang, Yijiang and Carstensen, Josephine and Mueller, Caitlin},
booktitle={Proceedings of International Association for Shell and Spatial Structures (IASS)},
year={2018}
}
Kam-Ming Mark Tam, Daniel J. Marshall, Mitchell Gu, Jasmine Kim, Yijiang Huang, Justin Lavallee, Caitlin T. Mueller
“Fabrication-aware structural optimisation of lattice additive-manufactured with robot-arm,”
International Journal of Rapid Manufacturing, vol. 7, no. 2-3, pp. 120-168, 2018.
[BibTeX] [PDF] [DOI]
@article{tam2018fabrication,
title={Fabrication-aware structural optimisation of lattice additive-manufactured with robot-arm},
author={Tam, Kam-Ming Mark and Marshall, Daniel J and Gu, Mitchell and Kim, Jasmine and Huang, Yijiang and Lavallee, Justin and Mueller, Caitlin T},
journal={International Journal of Rapid Manufacturing},
volume={7},
number={2-3},
pages={120--168},
year={2018},
publisher={Inderscience Publishers (IEL)}
}
Yijiang Huang, Juyong Zhang, Xin Hu, Guoxian Song, Zhongyuan Liu, Lei Yu and Ligang Liu
“FrameFab: Robotic Fabrication of Frame Shapes,”
ACM Transactions on Graphics (TOG), vol. 35, no. 6, pp. 224:1--224:11 2016.
[BibTeX] [PDF] [ACM-DL Port] [Code] [Video]
@article{huang2016framefab,
author = {Huang, Yijiang and Zhang, Juyong and Hu, Xin and Song, Guoxian and Liu, Zhongyuan and Yu, Lei and Liu, Ligang},
title = {FrameFab: Robotic Fabrication of Frame Shapes},
journal = {ACM Trans. Graph.},
issue_date = {November 2016},
volume = {35},
number = {6},
month = nov,
year = {2016},
issn = {0730-0301},
pages = {224:1--224:11},
articleno = {224},
numpages = {11},
url = {http://doi.acm.org/10.1145/2980179.2982401},
doi = {10.1145/2980179.2982401},
acmid = {2982401},
publisher = {ACM},
address = {New York, NY, USA},
}
Lei Yu, Yijiang Huang, Zhongyuan Liu, Sai Xiao, Ligang Liu, Guoxian Song, Yanxin Wang
“Highly Informed Robotic 3D Printed Polygon Mesh - A Novel Strategy of 3D Spatial Printing,”
In: Conference of The Association for Computer Aided Design in Architecture (ACADIA), 2016.
[BibTeX] [PDF] [CumInCAD Port]
@inproceedings{yu2016acadia,
title={Highly Informed Robotic 3D Printed Polygon Mesh: A Novel Strategy of 3D Spatial Printing},
author={Yu, Lei and Huang, Yijiang and Liu, Zhongyuan and Xiao, Sai and Liu, Ligang and Song, Guoxian and Wang, Yanxin},
booktitle={Proceedings of the 36st Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA)},
year={2016},
pages={298-307},
}
Conference Abstracts, Posters, and Workshop Summaries
Yijiang Huang*, Pok Yin Victor Leung*, Caelan Garret, Fabio Gramazio, Matthias Kohler
“Planning Non-repetitive Robotic Assembly Processes with Task and Motion Planning (TAMP),”
In: 3rd Workshop on Future of Construction: Lifelong Learning Robots in Changing Construction Sites (2024), ICRA, Yokohama, Japan.
[Poster]
Yi-Hsiu Hung*, Chenming Jiang*, Ziqi Wang, Yijiang Huang, Aurèle L. Gheyselinck, Petrus Aejmelaeus-Lindström
“Computational Design and Assembly of Infinitely Reusable Kit of Parts,”
In: Future of Construction Symposium (2023), Munich, Germany.
[Poster]
 Keith J. Lee, Yijiang Huang, Caitlin Mueller
Keith J. Lee, Yijiang Huang, Caitlin Mueller
 Pok Yin Victor Leung, Yijiang Huang
Pok Yin Victor Leung, Yijiang Huang
 Yijiang Huang and Mohamed Tarek
Yijiang Huang and Mohamed Tarek